SMASH
シミュレーションをもっと身近な世界へ!
様々な機能でリアル環境とシミュレーション環境を接続!
センサー・コンベアー・デバイス情報
- センサー
- ワーク又はドグとの干渉により、設定されたデバイスにON/OFF状態を知らせます。赤:OFF/白:ONを意味します。正論理、負論理設定も可能です。
- コンベアー
- インバータ制御を想定しています。進行方向と速さを●ーで表し、この場合は左から右へ進みます。赤/高速・緑/中速・青/低速を意味します。
- デバイス情報
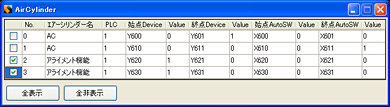
- デバイスに割り当てた制御対象(センサーなど)の情報(※Fig1)を画面上で確認しながら作業ができます。また(※Fig2)用にリストとして確認も可能です。

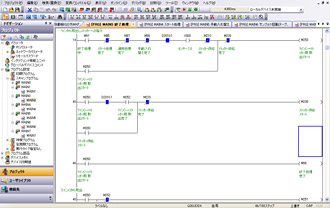
▲GX-Works2でプログラムやデバイスを同時に検証します
位置決め・ランプ・ドグ
- 位置決め
- 位置決め制御には
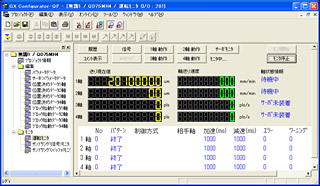
1.SMASHの仮想位置決め機能
2.位置決めユニット(QD75MH)アンプ無し運転機能(原点復帰シミュレーションも可能)を選択可能です。
- ランプ
- デバイスのON/OFFでランプに設定したパーツを点灯/消灯ができます。
- ドグ
- ワーク以外でセンサーをON/OFFできる部品を「ドグ」として設定できます。

▲QD75MHからの信号を数値として確認が可能です
▲GX-Works2でプログラムやデバイスを同時に検証します
エアシリンダー・壁機能
- エアシリンダー
- エアーシリンダーはシングルとダブルに対応。さらに動作確認のためのオートスイッチを設定可能です。
- 壁機能
- この壁機能によりワークの移動方向を矯正することが可能です。このデモムービーではアライメント機能として利用しています。
ロボット・ハンド・受け渡し
▲SMASH仮想ロボット
▲三菱電機製ロボットコントローラーに対応
- ロボット
- ロボットは
1.SMASH仮想ロボット
2.三菱電機製ロボットコントローラーに対応
- ハンド
- ロボット、エアーシリンダー等にハンドを装着し、ワークを持ち上げることができます。
- 受け渡し
- 受け渡し場所を設定することで、ワークをハンドで持ち上げたり、置いたりすることができます。
ピック&プレース・モーター
- ピック&プレース
- BOX機能は、接触したワークを自分の子として移動することができます。さらにBOX機能にデバイスを関連設定し、デバイスのON/OFFによってBOXとの親子関係を操作できます。この機能を使いワークを把持または吸着動作をシミュレーションできます。
- モーター
- モーターはデバイスにて正転、逆転設定が可能です。
Qモーションコントローラ
▲Xyテーブル
▲シーリング
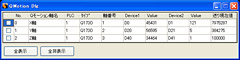
▲シーリングの各軸現在値表示画面
▲MT-Developer2設定画面
Q172D・Q173Dに対応!
1台のコントローラで最大16軸同期を取りながら同時に動かすことが可能ですが、動きが複雑になるため机上だけではデバッグが困難です。また実機での確認でも機械自体を壊しかねません。そのような時こそ、SMASHをご使用いただくことで、より正確で安全なシミュレーションが可能になります。
※サンプルは三菱電機さまホームページにあります「モーションシミュレーター用サンプルデータ」のプロジェクトを実際にQ173Dで動かしSMASH上で動作確認している様子です。